将人类从重复劳动中解放出来
机器人+AI

工业教育轻量型驱动一体化机械臂,仿生动物协作柔性外骨骼机器人
中空设计更适合多轴协作机械臂;高速闭环周期,更灵活可控,性能更高;关节自由组合,技术支持服务,可快速搭建。
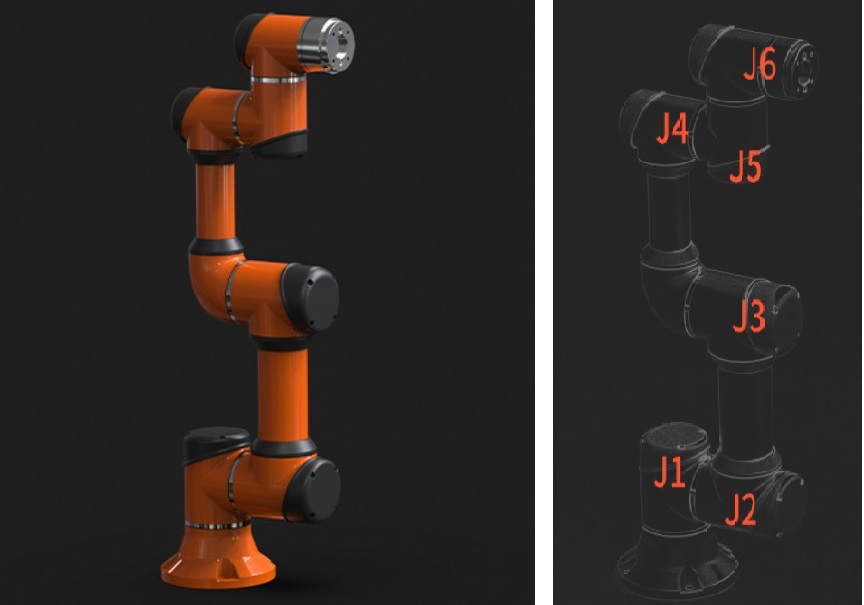
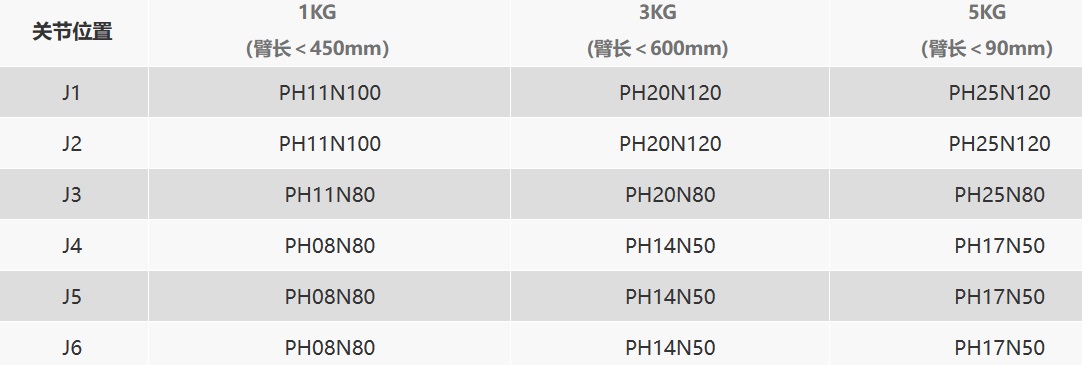
协作机械臂关节推荐
伺服模组采用中空设计,特别适合六轴协作机械臂,模组的高速闭环周期,可灵活控制机械臂的刚性和精度,为上位机提供高性能本体。
不同负载机器人关节自由组合,提供本体和软件技术支持,客户可快速搭建自己的机器人系统。
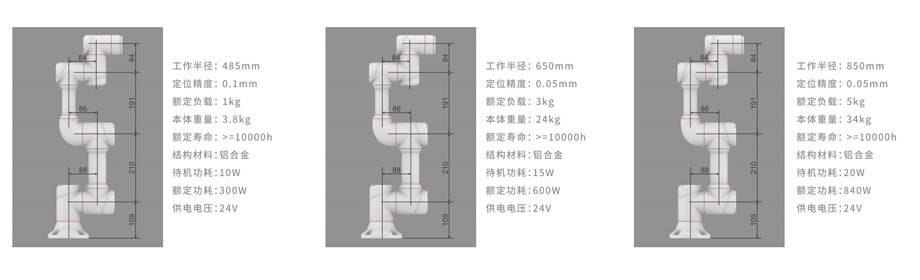
协作机械臂标准机型
协作机械臂-软件支持
伺服模组集成驱动,机械臂无需传统控制柜,上位机直接通过CANOPEN或ETHERCAT总线控制机械臂。
机械臂本体支持多种控制器方案,客户可按使用场景要求,选择不同的控制方式。

一体化伺服关节模组

